As a part of my summer at Edgerton, I also occasionally helped with the two-week long Seaglide workshop. Students were given the opportunity to build an underwater glider; it would take in water and release it periodically to change its buoyancy and cause it to sink and float. The lift created by the wings propelled the glider forwards as it sunk and rose. This was designed over at the Carderock naval base, where full scale gliders that run for months are deployed over the Atlantic Ocean to collect data regarding the ocean.
After the program was over, I was able to build one out of the extra materials. I started by preparing the outer casing.

Next, I soldered the circuitry unto the protoboard and the Arduino Pro mini and built the pump system controlled by a servo motor that would control the buoyancy change.
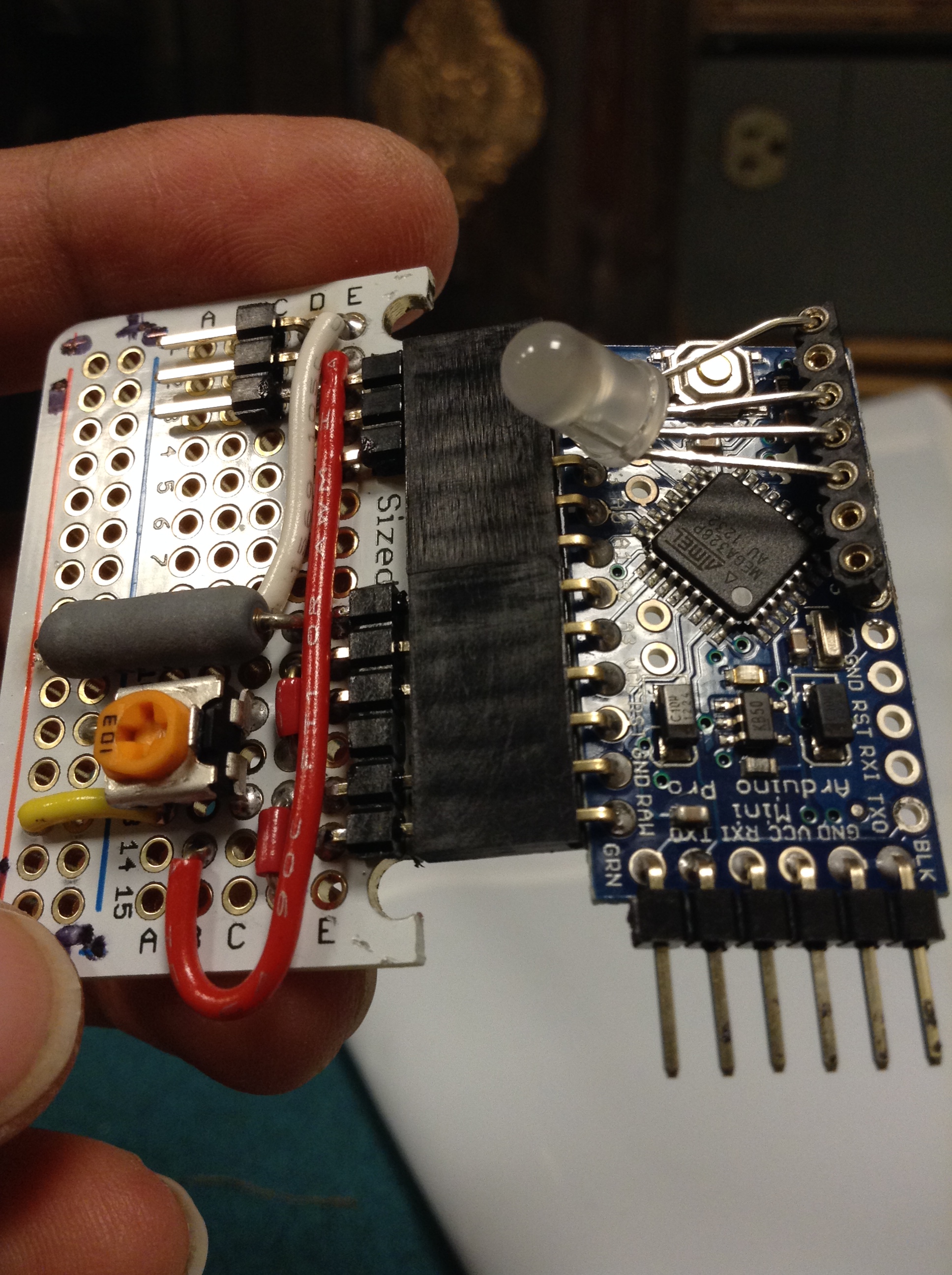
Protoboard and Arduino
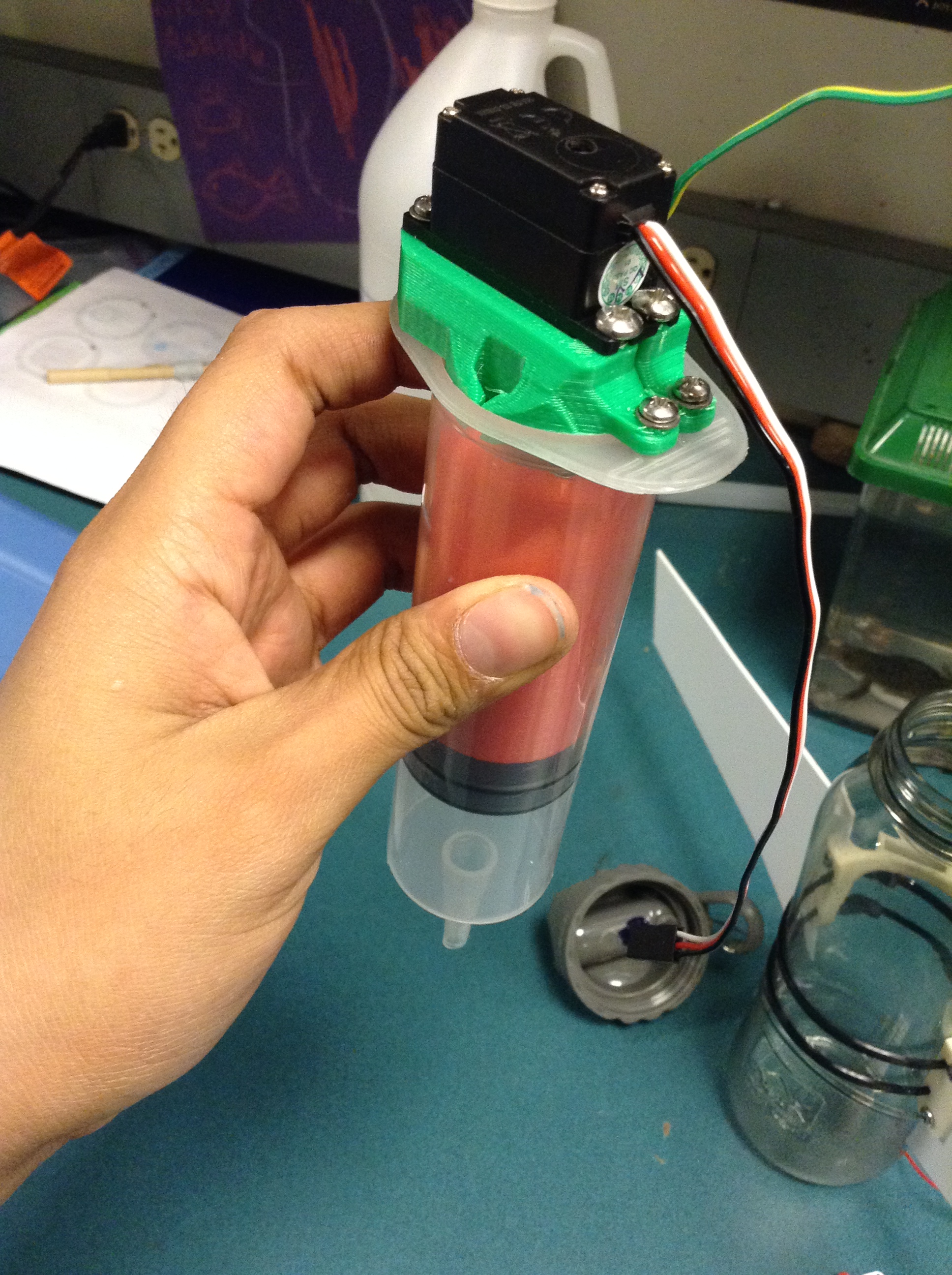
Syringe system
The backing of the 100cc syringe was replaced by copper plated bb gun pellets in a 3D printed case attached to the servo motor. This gives the glider a movable mass that allows the change in buoyancy. A push button (green and yellow wire in the picture, button not shown in the picture) is also attached to the syringe so the glider would be able to sense when to stop taking in water. Another sensor, the reflective sensor, is used for the glider to sense when to stop releasing water. The power supply is 5 triple A batteries with a switch to turn the glider on and off.

Above can be seen the internal parts.

The glider at its completion.
The final glider can be seen above. In fact, the students under the Seaglide program were given the opportunity to also add sensors to the front of their glider. Those materials ran out, so I did not have a chance to build it. The students were also given a chance to test their glider out in the MIT tow tank. Alas, I tested mine out in the kitchen sink. It was successful in the sense that it sunk and rose, although the reflective sensor required finer calibration.
Building this took me about 3 days to assemble and another day or two to fix mistakes and to get it to work. The main reason behind my mistakes were due to my dependence on written instructors instead of an instructor. I did not build this at the same time the students built this, so many errors I made could have been avoided with guidance from one of teachers of the workshop. For example, the reflective sensor is a recent addition to the glider, so there were vague instructions written up for that part of the glider. After stumbling around and trying to make sense of the instructions, I taught myself more about the sensor and was able to figure out where to attach it and how to calibrate it.